



机器人组装套件能实现机器人平台化,结构简单直观、安装简单、携带方便,易于定制和拓展。主要零部件全部采用高精度加工,表面精磨氧化,外观美观;电气原配件都是国际知名品牌,质量可靠,可选择拓展激光雷达、语音模块和Kinect、realsense、和平板显示等多种传感器和其他附件,可方便地实现自主导航、自主避障、 SLAM、人机交互和无线视频图像传输等功能。

自主导航

自主避障

SLAM

人机交互

无线传输

控制器NI myRIO-19000

具有65种多功能结构零件。包含255个铝合金、碳纤维等轻量化结构零件;7个双滚珠轴承固定座;30个以上多功能结构型材,兼容90度四孔60度6孔、120度3孔等多种链接方式。

具有15种传动系结构零件。含同步带传动、链传动、齿轮传动、齿条传动、直线滑轨、多孔径联轴器等89个零件,兼容3种轴径(φ4.7、φ6、φ8)传动结构。

具有2种比赛轮。包含4个直接130mm沙地轮和4个20kg级双排型全向轮。

具有6种以上传感器模块。包含超声、红外、9轴传感器、QTI传感器、摄像头、接近传感器。

具有2个10000mAh以上的12v动力电池。

具有4个连续1.5NM扭矩的高精度伺服电机。

具有3个300゜转角25kgf.cm扭矩的高精度伺服舵机和1个连续旋转25kgf.cm扭矩的高精度伺服舵机。

具有10多种电子拓展器件:指示灯、电源开关、转压模块、Myrio拓展板等。

具有1块传感器转接板及配备传感器连接线。所有传感器有专门接线插头,可接插在一块转接板上。

具有2套250mm 以上长度和1套450mm以上长度的高精度滚珠直线导轨。

具有1套夹具配件。



1. 核心芯片Xilinx Zynq-7010集成了667MHz双核ARM Cortex-A9,16个DMA通道的FPGA
2. 外围I/O接口:10路模拟量输入(AI)、6路模拟量输出(AO)、40路数字输入与输出(DIO)等
3. 内置512MB DDR3内存和256MB非易失存储器
4. 内置三轴加速度传感器
5. 可通过USB、Wifi方式与上位机相连
1. 易于上手使用:引导性的安装和启动界面可使用户更快地熟悉操作
2. 编程开发简单:支持用LabVIEW或C/C++对ARM进行编程,LabVIEW中包含大量现成算法函数,同时针对NI myRIO上的各种I/O接口提供经过优化设计的现成驱动函数,方便快速调用。如果需要对FPGA进行自定义编程,可采用LabVIEW图形化编程方式进行开发。
3. 安全性:直流供电,增设特别保护电路
4.便携性为了更方便快速的使用myRIO,使用NI 公司的LABVIEW 图形化编程软件
LabVIEW是一种程序开发环境,由美国国家仪器(NI)公司研制开发,类似于C和BASIC开发环境,但是LabVIEW与其他计算机语言的显著区别是:其他计算机语言都是采用基于文本的语言产生代码,而LabVIEW使用的是图形化编辑语言G编写程序,产生的程序是框图的形式。 LabVIEW软件是NI设计平台的核心,也是开发测量或控制系统的理想选择。 LabVIEW开发环境集成了工程师和科学家快速构建各种应用所需的所有工具,旨在帮助工程师和科学家解决问题、提高生产力和不断创新。
1.图形化用户界面开发;2.数据采集;3.仪器控制;4.报告生成和文件I/O ;5.700多个数学/分析函数 ;6.外部代码集成 (.dll) ;7.互联网连接;8.高级用户界面开发 ;9.应用发布 (creat.exe) ;10.开发管理 ;11.源代码控制
通过组装、搭建、运行机器人,激发学生学习兴趣、培养学生综合能力
了解机器人软件工程、硬件结构、功能与应用等方面的基本知识
实现机器人程序设计与编写
拼装多种具有实用功能的机器人
培养对人工智能技术的兴趣,真正认识到智能机器人对社会进步与经济发展的作用
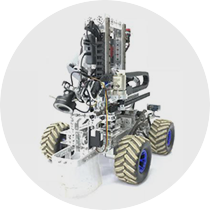
世赛移动机器人增强版(TRE06)主要由控制器,驱动机构,传动机构,传感器件,视觉设备,执行夹取组件,电池充电器等部分以及简单装配工具套装组成,模块化设计,并以散件套件方式提供用户。
用户可以参照标准模式搭建一套比较完善的移动机器人,也可以在充分掌握产品原理和技术细节后,发挥主观能动性,动手改动某个或者某几个功能模块或者配件,从而实践自己的设计思路。

 钛米官方微信公众号
钛米官方微信公众号

 沪公网安备 31011502010388号
沪公网安备 31011502010388号